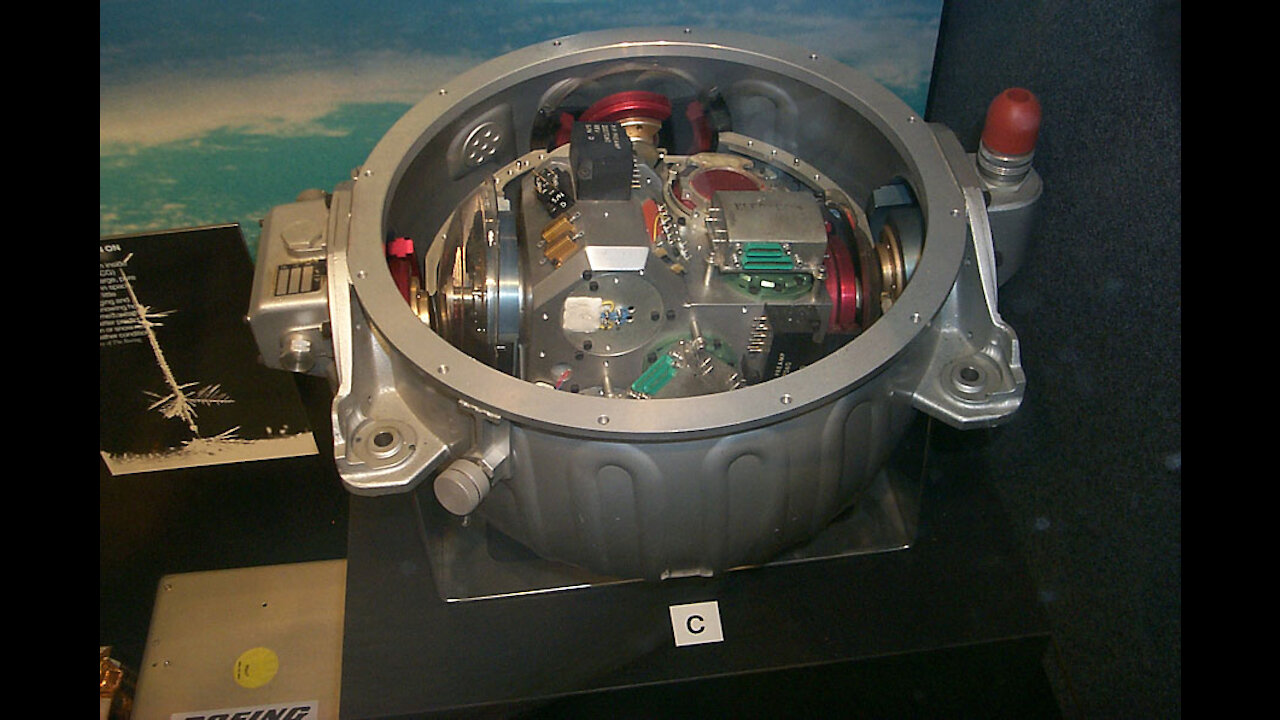
The special navigation of the lunar module
The IMU was essential for the navigation of the lunar module.
Indeed, it was containing the gyroscopes and accelerometers which were respectively allowing to update angles and speeds, which were used for the update of the navigation.
But, on the communication channels between the AGC and the LGC, there is nothing which allows the AGC to read the information of the IMU.
None of the programs of the AGC which are supposed to deal with the IMU tries to exploit the information of the IMU.
Two programs are supposed to make performance tests on the IMU, but, if these programs read a timer supposed to time this performance, in fact they don't really use this timer to make this test, for nothing is read from the IMU.
And a program also supposed to deal with the IMU only reads a channel which has nothing to do with the IMU, and which is in fact an output channel which contains the commands to set the main engine on and off.
The reality is that the lunar module had no possibility of exploiting the information sent by the IMU, and thence could not correctly update the navigation, which anyway does not matter much, as we have seen in previous videos that the the lunar module could not control the thrust of the descent engine, and neither the lateral thrusters of the RCS.
Link to the programs of the AGC:
https://www.ibiblio.org/apollo/listings/LUM99R2/MAIN.agc.html
Link to the description of the instructions of the AGC:
http://www.ibiblio.org/apollo/assembly_language_manual.html#The_Interpreter_vs._the_CPU
Link to the description of the communication channels between the AGC and the LGC:
https://github.com/chrislgarry/Apollo-11/blob/master/Luminary099/INPUT_OUTPUT_CHANNEL_BIT_DESCRIPTIONS.agc
-
 24:21
24:21
The Pascal Show
1 day ago $8.61 earned'CHALLENGE ACCEPTED!' TPUSA Breaks Silence On Candace Owens Charlie Kirk Allegations! She Responds!
32.7K19 -
 17:41
17:41
MetatronGaming
2 days agoI should NOT Have taken the elevator...
6.06K1 -
 LIVE
LIVE
Lofi Girl
3 years agolofi hip hop radio 📚 - beats to relax/study to
554 watching -
 1:20:23
1:20:23
Man in America
14 hours agoHow Epstein Blackmail & FBI Cover-Ups Are Fracturing MAGA w/ Ivan Raiklin
196K35 -
 2:13:49
2:13:49
Inverted World Live
9 hours agoSolar Storms Ground 1000 Planes | Ep. 151
112K10 -
 2:54:08
2:54:08
TimcastIRL
9 hours agoJ6 Pipe Bomb Suspect ARRESTED, Worked With BLM, Aided Illegal Immigrants | Timcast IRL
260K137 -
 3:59:02
3:59:02
Alex Zedra
8 hours agoLIVE! Bo7 Warzone
40.7K1 -
 4:37:35
4:37:35
Drew Hernandez
1 day agoCANDACE OWENS / TPUSA STALEMATE & DC PIPE BOMBER CAPTURED?!
64.1K38 -
 12:31
12:31
Robbi On The Record
10 hours ago $5.40 earnedWhy Nothing Feels Real Anymore | The Science, Culture, and Spiritual War Behind the Fog
48.5K11 -
 18:42
18:42
Navy Media
10 hours agoHouthis ATTACK the Wrong U.S. Fighter Jet – Then THIS Happened…
50.7K44