Magnetic Propulsion with Balanced Rotor having Uneven Distributed Mass and LDR
Note 20210705: This appears to be a false positive. It's always iffy when trying to get magnetic propulsion to work with an axle.
=========
This entire Earth field magnetic propelled boat weighs a whopping 1 pound and 5/8 ounces yet is driven by two half inch diameter neo magnets.
The electronic core that makes the servo turn when a bright light strikes the LDR's (reversing the direction of the magnets) was a good challenge to make. It uses an Arduino Nano, 2 LDR's, 2 LEDs and 4 resistors.
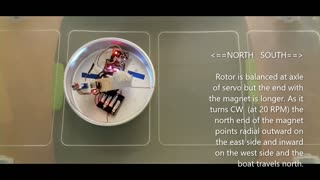
The concept is that the rotor is balanced at the axle but the mass is not evenly distributed so that when the torque from the magnet (compass) opposes the direction in which the rotor is turning that propels the boat north a little just like a collision between two rotating objects.
This is classic Newtonian motion because the torque from the magnet interacting with Earth's magnetic field is an external force acting on the boat.
The conservation of momentum is a little confusing but think of two spinning tops colliding and spinning off in different directions.
The great advantage of this particular design is that the entire boat doesn't have to spin or turn side to side.
Stay tuned:)
-
 1:48
1:48
MagneticPropulsion
2 months agoMore Precision Faster Compass Motor with Faster N20 Motor Does 288 RPM.
33 -
 15:43
15:43
MagneticPropulsion
2 years agoBalanced Rotor at Axle with Uneven Mass Distribution Revisited_2
19 -
 1:47
1:47
MagneticPropulsion
2 years ago $0.01 earnedMagnetic Propulsion with a Balanced Rotor with Turning Magnets on it's Longer End
32 -
 1:21
1:21
MagneticPropulsion
2 years agoBalanced Rotor at Axle with Uneven Mass Distribution Revisited
23 -
 3:22
3:22
MagneticPropulsion
2 years agoMagnetic Propulsion Motor Concept Evidence
70 -
 1:44
1:44
MagneticPropulsion
2 years agoMotor Concept Magnetic Propulsion 200
27 -
 2:42
2:42
MagneticPropulsion
3 years ago $0.01 earnedVirus Magnetic Propulsion with no Moving Parts
1401 -
 0:40
0:40
MagneticPropulsion
3 years agoMagnetic Propulsion with Stepper Motor 4 Ounce Model
391 -
 2:39
2:39
MagneticPropulsion
2 years agoMotor Concept Magnetic Propulsion
17 -
 1:30
1:30
MagneticPropulsion
2 years agoMagnetic Inertial Propulsion Tuned In Theory 2
12