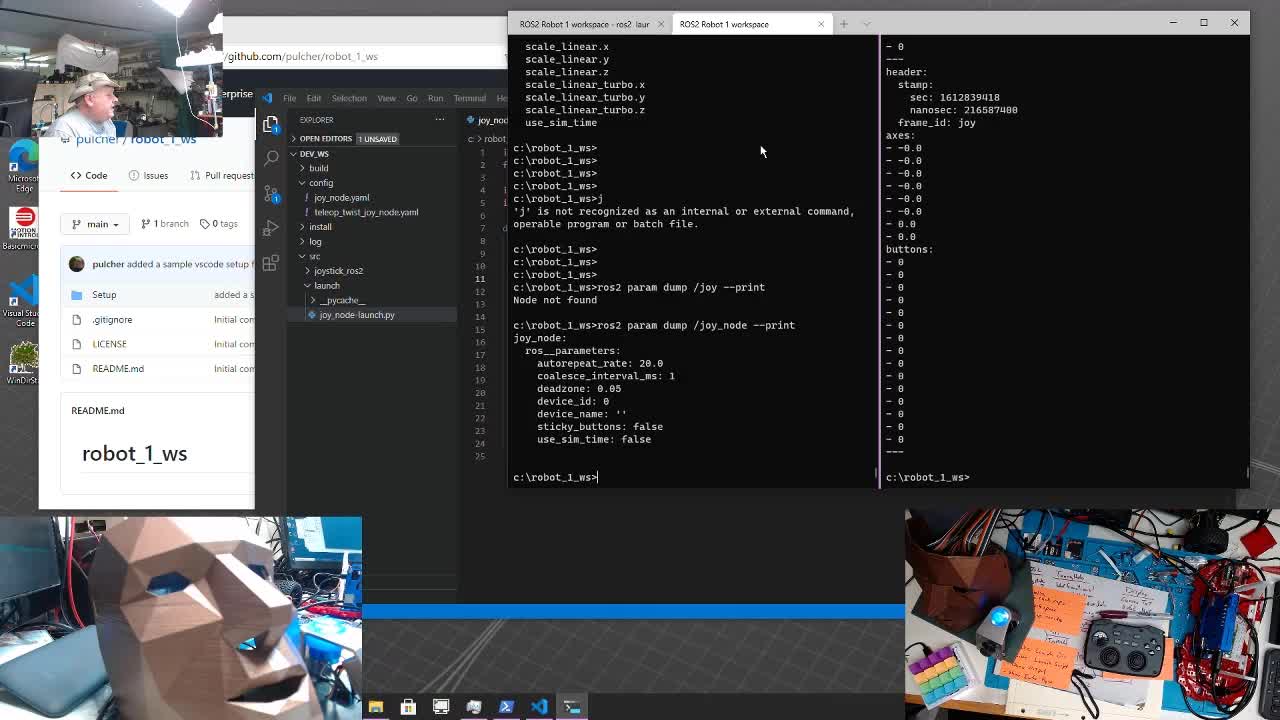
ROS2 USE Joy_node and teleop_twist_joy_node to grab data for moving a robot
As I was building my robot, I took a lot of time trying to figure out how to write this type of code myself. I was wrong, as this already existed. I didn't know about it, so I made a video to help others looking to do the same thing.
Things mentioned in this video:
joy node documentation: https://github.com/ros-drivers/joystick_drivers
joy system message documentation: http://docs.ros.org/en/api/sensor_msgs/html/msg/Joy.html
teleop_twist_joy node documentation: https://github.com/ros2/teleop_twist_joy
twist system message documentation: http://docs.ros.org/en/melodic/api/geometry_msgs/html/msg/Twist.html
my robot github repository: https://github.com/pulcher/robot_1_ws
Bio:
Harold Pulcher is a Microsoft MVP, co-ambassador for Hackster.io, developer, network engineer, magician, woodworker, and part time grease monkey. He has over 25 years of experience working in Information Technology. During that time he has done everything from running network cable, setting up various companies infrastructure from the absolute bare metal, and building line of business software for many of those companies. As passionate as he is about technology, you might happen to see him checking his air reserve while at a depth of 60 feet, cooking up a mean “free-range” fruit cake, doing pre-show table magic at the improv, or making a nice piece of wood into a lot of sawdust so my wife will have potting bench for her plants.
--------------------------------
Where am I on the Internet
--------------------------------
Website:https://pulcher.biz
email: [email protected]
twitter: https://www.twitter.com/haroldpulcher
twitch: https://www.twitch.com/haroldpulcher
discord: https://discord.gg/4X6SSpJNEW
linkedin: https://www.linkedin.com/in/harold-pulcher-microsoft-mvp/
-
 0:18
0:18
Dangermmm
4 years ago $0.01 earnedMoving Statue
2442 -
 1:08
1:08
Patriot797
4 years ago $0.05 earnedMysterious Robot
325 -
 0:27
0:27
Kintagious
4 years agoMoving the shed
44 -
 3:24
3:24
SharcomRealty
4 years ago7 Tips When Moving
13 -
 0:25
0:25
Roadkings2Freedom
4 years ago $0.03 earnedMoving Logs
150 -
 0:19
0:19
WFTX
4 years agoOlympics moving ahead
1171 -
 LIVE
LIVE
Akademiks
3 hours agoKendrick tries to Flip the Bots on DRAKE? WHo Beats Jay z in a verzuz. Blueface finally free!
937 watching -
 1:38:16
1:38:16
Professor Nez
9 hours ago🚨ELECTION NIGHT 2025 LIVE! Massive Upsets Brewing in New York, New Jersey & Virginia!
28.1K9 -
 4:48:50
4:48:50
Due Dissidence
12 hours agoLIVE: ELECTION RESULTS From NYC, NJ, and VA - Trump Approval CRATERS, Kash's Private Jet CRASH OUT
47.2K20 -
 12:50
12:50
Demons Row
5 hours ago $0.04 earnedBikers of New Jersey 💀🏍️ Pagans, Thunder Guards, and Thug Riders
23.2K6