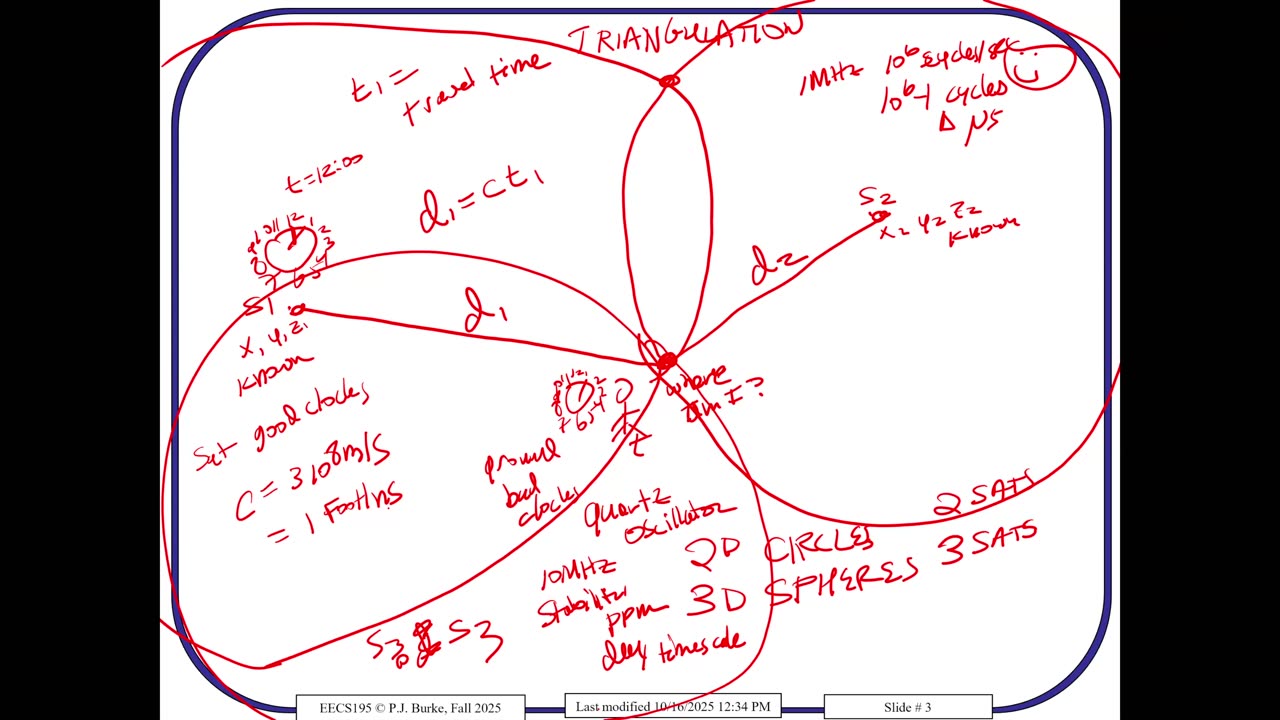
Drone Navigation Theory
7 days ago
1
GPS, Lidar, Sonar, Radar, optical flow sensors, GPS denied navigation.
From University of California, Irvine course: EECS 195 "Drones", Fall 2025.
Course website: https://canvas.eee.uci.edu/courses/74191
Copyright Peter Burke, 2025.
Loading comments...
-
 LIVE
LIVE
Crypto Power Hour
10 hours agoSolana Treasury Strategy w/ Joseph Onorati, CEO, DeFi Dev. Corp.
5,198 watching -
 LIVE
LIVE
Plan ₿ Forum
2 days agoWAGMI Stage – Lugano Plan ₿ Forum 2025 | Live from Lugano 🇨🇭
5,358 watching -
 12:29
12:29
Clintonjaws
10 hours ago $0.67 earnedShane Gillis vs 'The View' - This Is Priceless!
372 -
 22:53
22:53
Jasmin Laine
16 hours agoCarney’s Speech BACKFIRES Spectacularly—Liberals PANIC on National TV
89116 -
 1:38
1:38
Jeff Ahern
10 hours ago $0.18 earnedThe Mamdani Effect
2101 -
 LIVE
LIVE
The Bubba Army
21 hours agoNBA BETTING SCANDAL! - Bubba the Love Sponge® Show | 10/24/25
572 watching -
 8:01
8:01
The Gun Collective
13 hours agoBEST new 2011 in 2025? -- Kimber 2K11 Pro Honest Review!
1.78K1 -
 8:49
8:49
Millionaire Mentor
15 hours agoMAGA Vet SHUTS DOWN AOC So Hard She LOST IT
1.88K10 -
 7:25
7:25
The Shannon Joy Show
15 hours agoWhat is the PRIME Act? With Rep. Thomas Massie
2.28K3 -
 24:17
24:17
The Official Corbett Report Rumble Channel
12 hours agoGates' Fake Meat Agenda Flops! - #NewWorldNextWeek
3.34K9