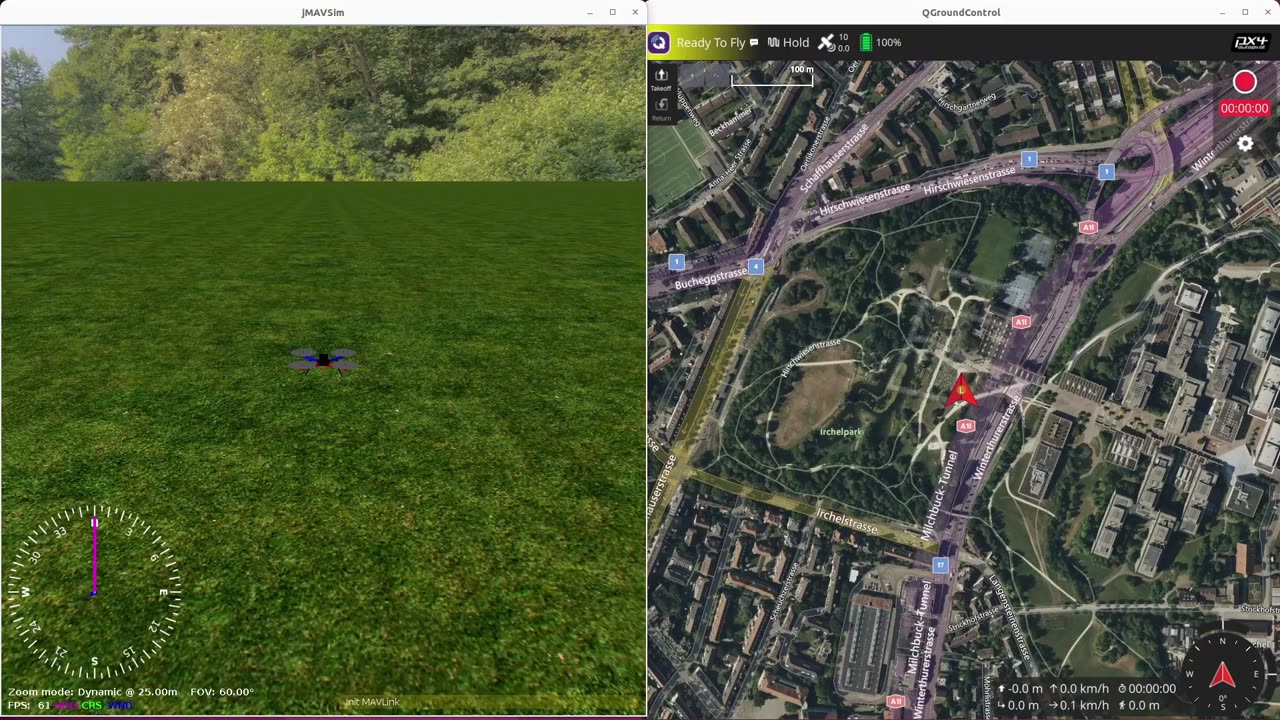
PX4 + ROS2 + XBOX + JMavSim + QGroundControl = an amazing result!
5 days ago
3
This video shows how to integrate ROS2 and PX4 to control a simulated UAV using velocity. An XBOX controller is used for user controls. The UAV system can be simulated with either Gazebo or JMAVSim.
For the complete code, please visit the following GitHub repository:
Loading comments...
-
 1:41:59
1:41:59
THE Bitcoin Podcast with Walker America
8 hours ago $9.21 earnedThe Assassination of Charlie Kirk | Walker America, American Hodl, Erik Cason, Guy Swann
16K15 -
 21:33
21:33
marcushouse
3 hours ago $0.06 earnedSpaceX Just Revealed the Plan for Starship Flight 11! 🚀
9214 -
 35:03
35:03
Clownfish TV
6 hours ago'Live by the Sword, Die by the Sword.' | Clownfish TV
51427 -
 8:15
8:15
Sideserf Cake Studio
1 hour agoA Hyperrealistic TAKIS Cake?
271 -
 55:49
55:49
SGT Report
13 hours agoFAKED TRAGEDY, LONE GUNMAN OR PATSY? -- Jeffrey Prather
15.2K89 -
 9:30
9:30
Adam Does Movies
12 hours ago $0.04 earnedThe Long Walk - Movie Review
791 -
 2:28
2:28
WildCreatures
14 days ago $0.30 earnedNature's struggle for survival: Water snake devours mudpuppy
1.83K2 -
 1:07
1:07
Memology 101
13 hours ago $0.03 earnedEric Swallowswell compares January 6th to 9/11 and Pearl Harbor
72712 -
 24:21
24:21
Uncommon Sense In Current Times
18 hours ago $9.68 earnedA Revolution of Virtue | Charlie Kirk on Beating the Woke, Faith & Saving the West
24.5K27 -
 33:17
33:17
Homesteading Family
3 hours agoThe End of The Pantry Chat
17.6K8