Sở Hải Phòng: Một robot khảo sát không gian hoạt động trong môi trường 3D có một cảm biến hình cầu,
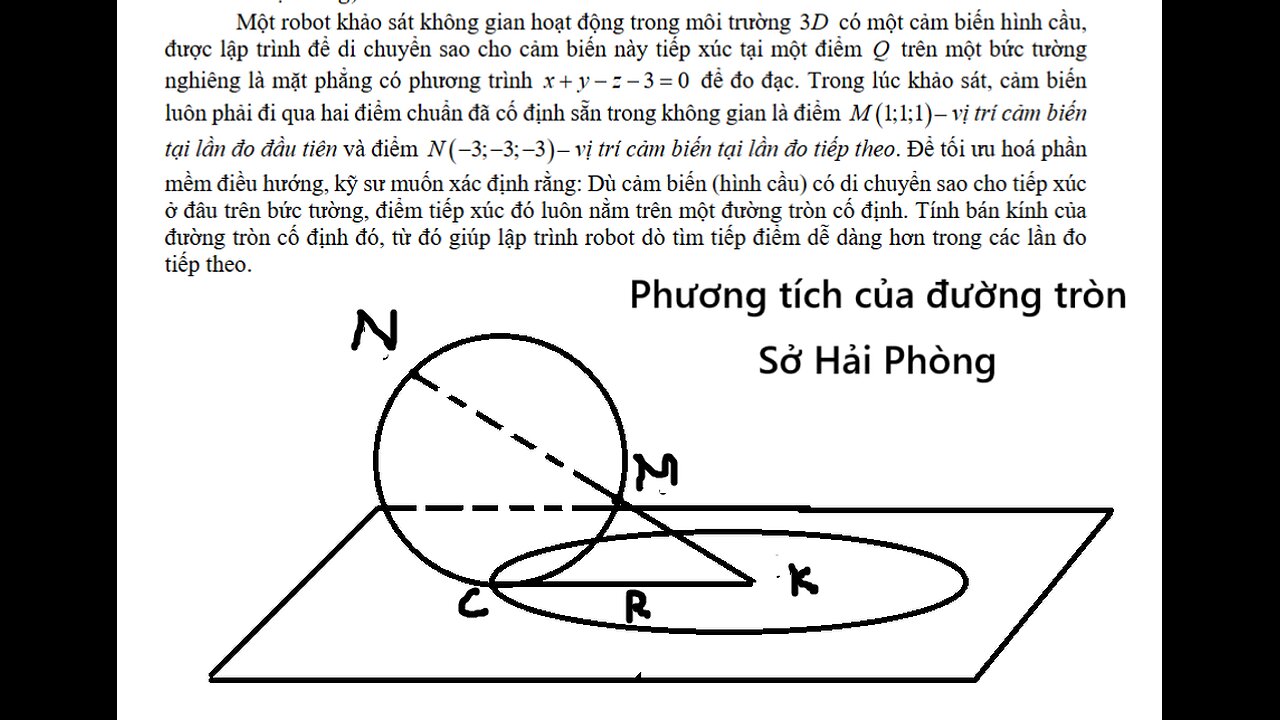
Một robot khảo sát không gian hoạt động trong môi trường 3D có một cảm biến hình cầu,
được lập trình để di chuyển sao cho cảm biến này tiếp xúc tại một điểm Q trên một bức tường
nghiêng là mặt phẳng có phương trình 3 0x y z+ − − = để đo đạc. Trong lúc khảo sát, cảm biến
luôn phải đi qua hai điểm chuẩn đã cố định sẵn trong không gian là điểm ( )1;1;1M – vị trí cảm biến
tại lần đo đầu tiên và điểm ( )3; 3; 3N − − − – vị trí cảm biến tại lần đo tiếp theo. Để tối ưu hoá phần
mềm điều hướng, kỹ sư muốn xác định rằng: Dù cảm biến (hình cầu) có di chuyển sao cho tiếp xúc
ở đâu trên bức tường, điểm tiếp xúc đó luôn nằm trên một đường tròn cố định. Tính bán kính của
đường tròn cố định đó, từ đó giúp lập trình robot dò tìm tiếp điểm dễ dàng hơn trong các lần đo
tiếp theo
-
 2:08:03
2:08:03
Inverted World Live
8 hours agoCharlie Kirk Assassinated | Ep. 106
102K53 -
 3:01:07
3:01:07
TimcastIRL
10 hours agoCharlie Kirk Assassinated, Suspect In Custody | Timcast IRL
636K1K -
 5:44:49
5:44:49
Redacted News
12 hours agoTurning the Tide: 9/11 Justice in 2025 — Day 1 with Sen. Ron Johnson, Richard Gage and More
183K78 -
 2:48:00
2:48:00
TheSaltyCracker
10 hours agoYou're Being Hunted ReeEEStream 9-10-25
302K610 -
 13:09:56
13:09:56
LFA TV
23 hours agoBREAKING: CHARLIE KIRK ASSASSINATED - WEDNESDAY 9/10/25
386K128 -
 1:31:08
1:31:08
I_Came_With_Fire_Podcast
10 hours agoCheck Fire: God Bless Charlie Kirk
100K27 -
 1:13:35
1:13:35
Glenn Greenwald
12 hours agoCharlie Kirk Assassinated; NATO Alleges Russian Drones Flew Over Poland, and More | SYSTEM UPDATE #512
299K309 -
 1:46:28
1:46:28
Badlands Media
1 day agoAltered State S3 Ep. 45: The Assassination of Charlie Kirk
173K29 -
 8:56:53
8:56:53
Dr Disrespect
18 hours ago🔴LIVE - DR DISRESPECT - THE FINALS - NEW SEASON 8 LAUNCH EVENT W/ THE SHOTTY BOYS
289K11 -
 27:00
27:00
BonginoReport
13 hours agoRest In Peace Charlie Kirk - Nightly Scroll w/ Hayley Caronia (Ep.131) - 09/10/2025
269K417