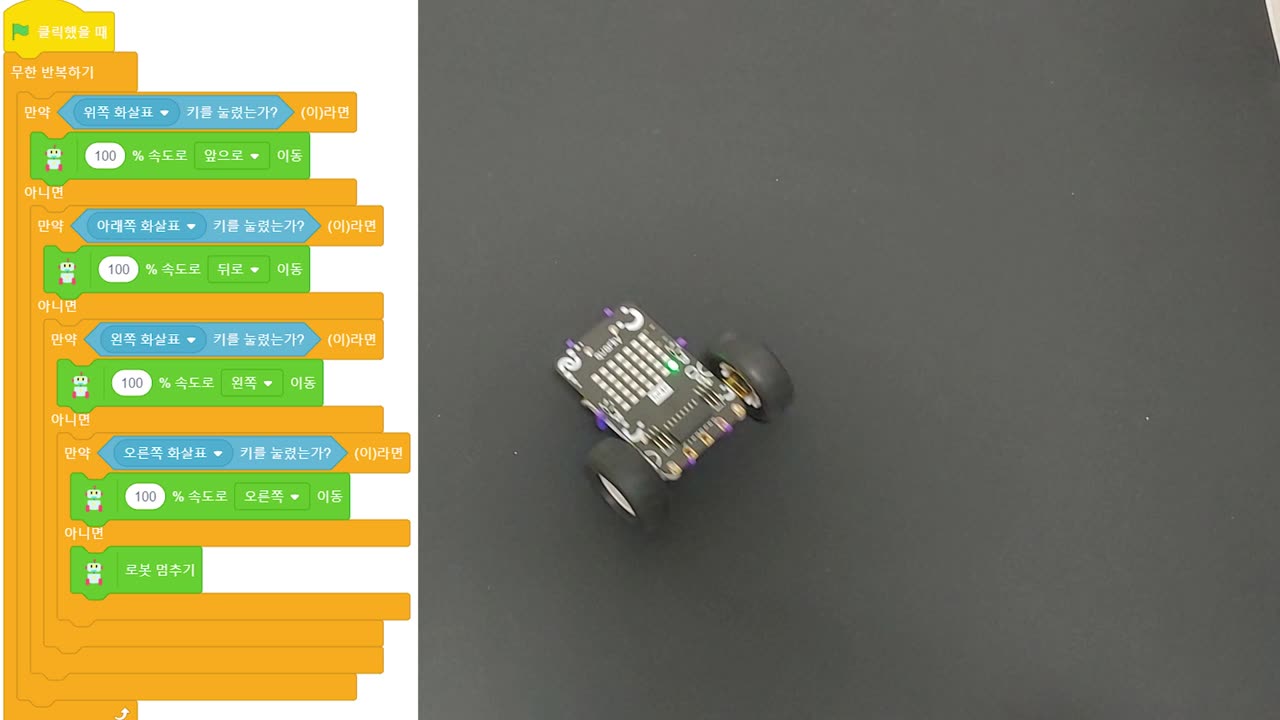
quarky robot motor block coding
Loading 1 comment...
-
 25:29
25:29
Stephen Gardner
2 hours ago💣 Trump White House UNEXPECTED Move + Thune DESTROYS Schumer on Senate Floor!!
15.2K12 -
 LIVE
LIVE
Drew Hernandez
13 hours agoSPOOKY WOKE HAG CALLS FOR DEMS TO EMBRACE CELEBRATING EXECUTION OF CHARLIE KIRK?!
335 watching -
![MAHA News [10.31] - HHS Coup, Big Food Documentary, SNAP Scams, Microplastic Solutions](https://1a-1791.com/video/fwe2/d9/s8/1/w/q/m/v/wqmvz.0kob-small-MAHA-News-10.31.jpg) LIVE
LIVE
Badlands Media
15 hours agoMAHA News [10.31] - HHS Coup, Big Food Documentary, SNAP Scams, Microplastic Solutions
588 watching -
 1:10:12
1:10:12
The Quartering
3 hours agoFood Wars Begin! Terror Plot Foiled & Much More!
76.9K22 -
 1:09:50
1:09:50
The Culture War with Tim Pool
4 hours agoJamaica Hurricane Predicts POLE SHIFT, The END Is Nigh | The Culture War with Tim Pool
125K100 -
 2:44:08
2:44:08
Lara Logan
11 hours agoSHOTS FIRED: The Tyranny of Big Pharma Exposed with Dr. Sherri Tenpenny | EP 42 | Lara Logan
34.2K10 -
 1:01:45
1:01:45
Playback Request Live
2 hours agoPRL LIVE @ DREAMHACK!!
20.5K1 -
 LIVE
LIVE
Dr Disrespect
6 hours ago🔴LIVE - DR DISRESPECT - ARC RAIDERS - DANGEROUS ADVENTURES (LEVEL 12)
1,318 watching -
 14:15
14:15
Tactical Advisor
5 days agoEverything You Need To Know About PSA Mixtape Vol 1. (FIRST LOOK)
10.5K5 -
 1:03:11
1:03:11
Jeff Ahern
2 hours agoFriday Freak out with Jeff Ahern
6.39K3