
Ai Learn to Walk and Rise
7 months ago
2
The goal of the DELMO project was to enable a robot to walk on rough terrain and get back up after a fall.
Due to catastrophic forgetting, it was impossible to teach him to walk or stand up without him losing his abilities in the other area.
I tried several learning approaches, including Curriculum Learning and Multi-Task Learning, but the forgetting issue was too severe, regardless of the chosen method.
This version uses a multimodal system to allow him to react appropriately to each situation.
Loading comments...
-
 2:56:25
2:56:25
Barry Cunningham
5 hours agoTHE TAKING OF CHARLIE KIRK HAS IGNITED A FLAME! AND A BREAKING (BUT NOT SHOCKING) UPDATE!
70.6K73 -
 9:38
9:38
Exploring With Nug
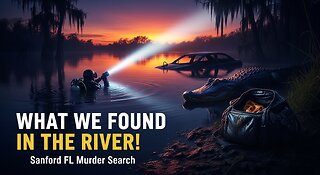
9 hours ago $1.00 earnedSearching Florida Waters for a Missing Murder Victim’s Car | Alligator Encounter!
11.3K1 -
 LIVE
LIVE
SavageJayGatsby
21 hours agoSpicy Bite Saturday | Let's Play: Supermarket Together
86 watching -
 23:23
23:23
MYLUNCHBREAK CHANNEL PAGE
22 hours agoIstanbul Should Not Exist - Pt 1
33.1K22 -
 1:27:40
1:27:40
Jeff Ahern
5 hours ago $8.26 earnedThe Saturday Show With Jeff Ahern
72.3K30 -
 31:55
31:55
Chris Harden
7 days ago $0.94 earnedChattanooga | Overrated or Underrated?
13K2 -
 11:08
11:08
JohnXSantos
1 day ago $0.41 earnedI Challenged AI to Build a Viral Product From Scratch
13.6K3 -
 0:39
0:39
Danny Rayes
23 hours ago $1.56 earnedHis Grandma Thinks He's Innocent!
14.2K14 -
 8:39
8:39
Rethinking the Dollar
9 hours agoSilver Is Rising Fast — But I’m Struggling to Buy More
11.8K6 -
 1:43:14
1:43:14
The Quartering
7 hours agoMassive Charlie Kirk Bombshell! We Knew It!
126K393