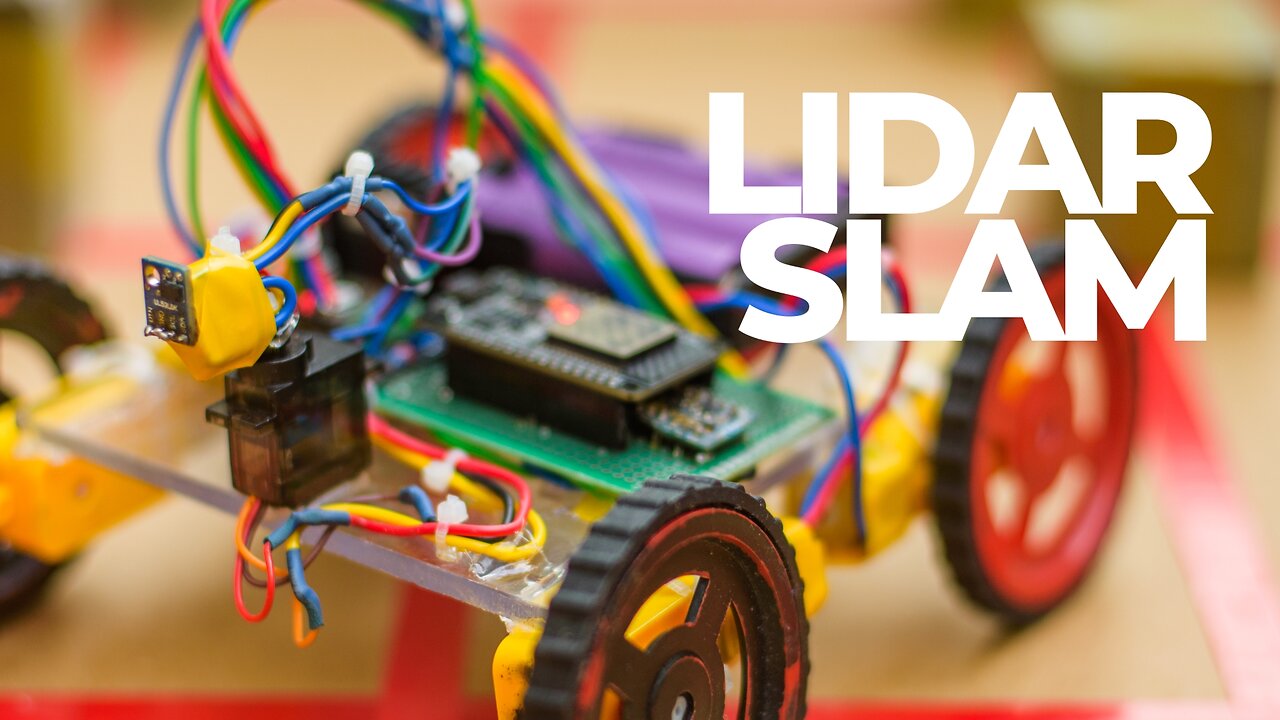
DIY LiDAR SLAM Robot from Scratch – No Libraries, No Simulations! Witness the Future of Robotics!
Embark on a groundbreaking journey into the world of SLAM (Simultaneous Localization and Mapping) as we unveil a DIY LiDAR-based SLAM system—built entirely from scratch! In this deep-dive documentary, we take you through the creation of a custom robotic car equipped with a handmade LiDAR sensor using a Time-of-Flight laser and a servo motor. From coding the entire SLAM architecture in pure Python to visualizing it with OpenCV, this project demonstrates what’s possible when you push boundaries and go beyond existing libraries.
No shortcuts. No pre-made toolkits. Just raw innovation and deep technical exploration!
We faced real-world data challenges head-on, employing particle filters, noise reduction techniques, and advanced probabilistic methods to refine our sensor data. But that’s not all—we took things to the next level by integrating AI-driven calibration to maximize accuracy and performance. This wasn't just a SLAM experiment; it was a complete robotics system, culminating in the porting of our Python project into ROS2, bringing together the power of Python and the flexibility of Robot Operating System.
In this video, you'll see the A pathfinding algorithm* in action, powered by our own custom-built library: Vagabond! 🚀 Vagabond simplifies the complexities of pathfinding, allowing users to define environments, set start and end points, and watch as the A* algorithm efficiently navigates through it all. Whether you're into robotics, AI, or game development, this library offers endless possibilities!
Highlights of the Project:
1. Handcrafted LiDAR Sensor: Created using a servo and Time-of-Flight sensor.
2. Pure Python SLAM: No pre-built libraries, everything coded from scratch.
3. Noise Reduction & AI Calibration: Smarter, more accurate SLAM data.
4. Vagabond Pathfinding: Unlock powerful algorithms like A* and Dijkstra's with ease.
5. Seamless Integration with ROS2: Bringing SLAM to life with real-time data visualization in RViz.
6. Dynamic Pathfinding & Navigation: Watch the robot adjust to real-time changes and navigate like a pro.
Ready to dive into the future of DIY Robotics? This is not your ordinary SLAM tutorial. We’re pushing the limits of what’s possible in robotics and automation—and it’s time for you to join us on this journey!
Be sure to check out and use Vagabond, our open-source pathfinding library that makes integrating algorithms like A* and Dijkstra's a breeze in your own projects:
https://github.com/Kawai-Senpai/Vagabond
#Robotics #SLAM #LiDAR #DIYRobot #AI #PythonProgramming #Pathfinding #OpenCV #ROS2 #AstarAlgorithm #Automation #TechInnovation #VagabondLibrary
-
 LIVE
LIVE
DynastyXL
2 hours ago🔴 LIVE NOW – ARC RAIDING - BADLY! - NEW RUMBLE WALLET - THOUGHTS?
79 watching -
 2:20:13
2:20:13
Side Scrollers Podcast
20 hours agoVoice Actor VIRTUE SIGNAL at Award Show + Craig’s HORRIBLE Take + More | Side Scrollers
62.2K20 -
 LIVE
LIVE
EXPBLESS
42 minutes agoShowcasing New Game | (Where Winds Meet) #RumblePremium
39 watching -
 LIVE
LIVE
Boxin
1 hour agolets BEAT! Kingdom Hearts!
51 watching -
 18:49
18:49
GritsGG
17 hours agoI Was Given a Warzone Sniper Challenge! Here is What Happened!
18.6K1 -
 19:02
19:02
The Pascal Show
1 day ago $6.30 earnedNOT SURPRISED! Pam Bondi Is Lying To Us Again About Releasing The Epstein Files
23.9K21 -
 6:05
6:05
Blabbering Collector
20 hours agoRowling On Set, Bill Nighy To Join Cast, HBO Head Comments On Season 2 Of Harry Potter HBO!
22K4 -
 57:44
57:44
TruthStream with Joe and Scott
2 days agoShe's of Love podcast & Joe:A co-Hosted interview, Mother and Daughter (300,000+Facebook page) Travel, Home School, Staying Grounded, Recreating oneself, SolarPunk #514
39.6K1 -
 30:49
30:49
MetatronHistory
1 day agoThe Truth about Women Warriors Based on Facts, Evidence and Sources
38.2K20 -
 2:59:08
2:59:08
FreshandFit
15 hours agoA Sugar Baby & A Feminist ALMOST Fight Each Other
272K74