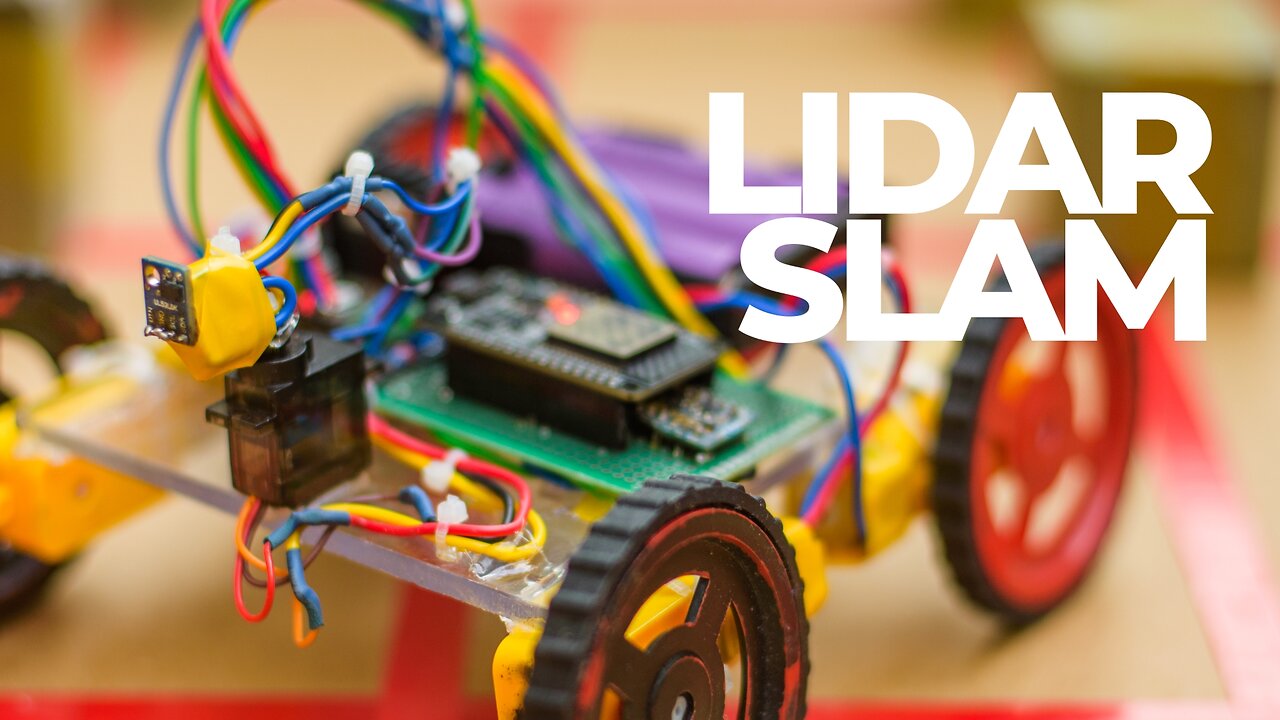
DIY LiDAR SLAM Robot from Scratch – No Libraries, No Simulations! Witness the Future of Robotics!
Embark on a groundbreaking journey into the world of SLAM (Simultaneous Localization and Mapping) as we unveil a DIY LiDAR-based SLAM system—built entirely from scratch! In this deep-dive documentary, we take you through the creation of a custom robotic car equipped with a handmade LiDAR sensor using a Time-of-Flight laser and a servo motor. From coding the entire SLAM architecture in pure Python to visualizing it with OpenCV, this project demonstrates what’s possible when you push boundaries and go beyond existing libraries.
No shortcuts. No pre-made toolkits. Just raw innovation and deep technical exploration!
We faced real-world data challenges head-on, employing particle filters, noise reduction techniques, and advanced probabilistic methods to refine our sensor data. But that’s not all—we took things to the next level by integrating AI-driven calibration to maximize accuracy and performance. This wasn't just a SLAM experiment; it was a complete robotics system, culminating in the porting of our Python project into ROS2, bringing together the power of Python and the flexibility of Robot Operating System.
In this video, you'll see the A pathfinding algorithm* in action, powered by our own custom-built library: Vagabond! 🚀 Vagabond simplifies the complexities of pathfinding, allowing users to define environments, set start and end points, and watch as the A* algorithm efficiently navigates through it all. Whether you're into robotics, AI, or game development, this library offers endless possibilities!
Highlights of the Project:
1. Handcrafted LiDAR Sensor: Created using a servo and Time-of-Flight sensor.
2. Pure Python SLAM: No pre-built libraries, everything coded from scratch.
3. Noise Reduction & AI Calibration: Smarter, more accurate SLAM data.
4. Vagabond Pathfinding: Unlock powerful algorithms like A* and Dijkstra's with ease.
5. Seamless Integration with ROS2: Bringing SLAM to life with real-time data visualization in RViz.
6. Dynamic Pathfinding & Navigation: Watch the robot adjust to real-time changes and navigate like a pro.
Ready to dive into the future of DIY Robotics? This is not your ordinary SLAM tutorial. We’re pushing the limits of what’s possible in robotics and automation—and it’s time for you to join us on this journey!
Be sure to check out and use Vagabond, our open-source pathfinding library that makes integrating algorithms like A* and Dijkstra's a breeze in your own projects:
https://github.com/Kawai-Senpai/Vagabond
#Robotics #SLAM #LiDAR #DIYRobot #AI #PythonProgramming #Pathfinding #OpenCV #ROS2 #AstarAlgorithm #Automation #TechInnovation #VagabondLibrary
-
 2:48:01
2:48:01
TimcastIRL
7 hours agoLIVE Election Coverage: Polling Stations SWATTED, Bomb Threats Called In | Timcast IRL
245K175 -
 3:30:07
3:30:07
Barry Cunningham
8 hours agoBREAKING NEWS: COUNTDOWN TO COMMUNISM! ELECTION RESULTS SHOW!
54.7K44 -
 2:11:28
2:11:28
DeVory Darkins
7 hours agoLIVE NOW: 2025 Election results and Exit Polls AMA
65K44 -
 2:34:04
2:34:04
DLDAfterDark
6 hours ago $0.06 earnedJust Another Tuesday - In Virginia - The Governor's Race & Glock Talk
26K6 -
 3:21:38
3:21:38
The Charlie Kirk Show
9 hours agoJUDGMENT DAY 2025: The Election Results Stream
194K80 -
 3:51:07
3:51:07
MattMorseTV
10 hours ago $0.80 earned🔴Election Day LIVE COVERAGE.🔴
95.8K48 -
 1:16:51
1:16:51
Flyover Conservatives
1 day agoSHOCKING DATA REVEALS: Young Voters Are Done With the Old GOP - Mark Mitchell, Rasmussen Reports | FOC Show
40.5K17 -
 1:15:28
1:15:28
Sarah Westall
9 hours agoGrooming is Protected and Encouraged by the System – Michelle Peterson and Mike Adamovich
34.2K10 -
 4:00:13
4:00:13
Akademiks
7 hours agoKendrick tries to Flip the Bots on DRAKE? WHo Beats Jay z in a verzuz. Blueface finally free!
38.5K10 -
 1:38:16
1:38:16
Professor Nez
12 hours ago🚨ELECTION NIGHT 2025 LIVE! Massive Upsets Brewing in New York, New Jersey & Virginia!
32.4K14