#Scientists have developed a new #deployment #strategy for a 3-body chain-type tethered #satellite
#Scientists have developed a new #deployment #strategy for a 3-body chain-type tethered #satellite #system in low-eccentric orbits using only tether. The tethered satellite system (TSS) has been used in Earth observations, space interferometry, and other space missions due to its potential merits. The tethered TSAR (#tomographic #synthetic #aperture radar) system is a group of tethered SAR satellites that can be rapidly deployed and provide a stable baseline for 3-dimensional topographic mapping and moving target detection.
Several #controlmethods, including length, length rate, #tension, and #thrustaided control, have been #proposed over the years. Adjusting #tension is a viable yet challenging approach due to the tether's strong nonlinearity and underactuated traits. A research team led by Zhongjie Meng from Northwestern Polytechnical University has developed a new deployment strategy for a 3-body chain-type tethered satellite system in a low-eccentric elliptical orbit.
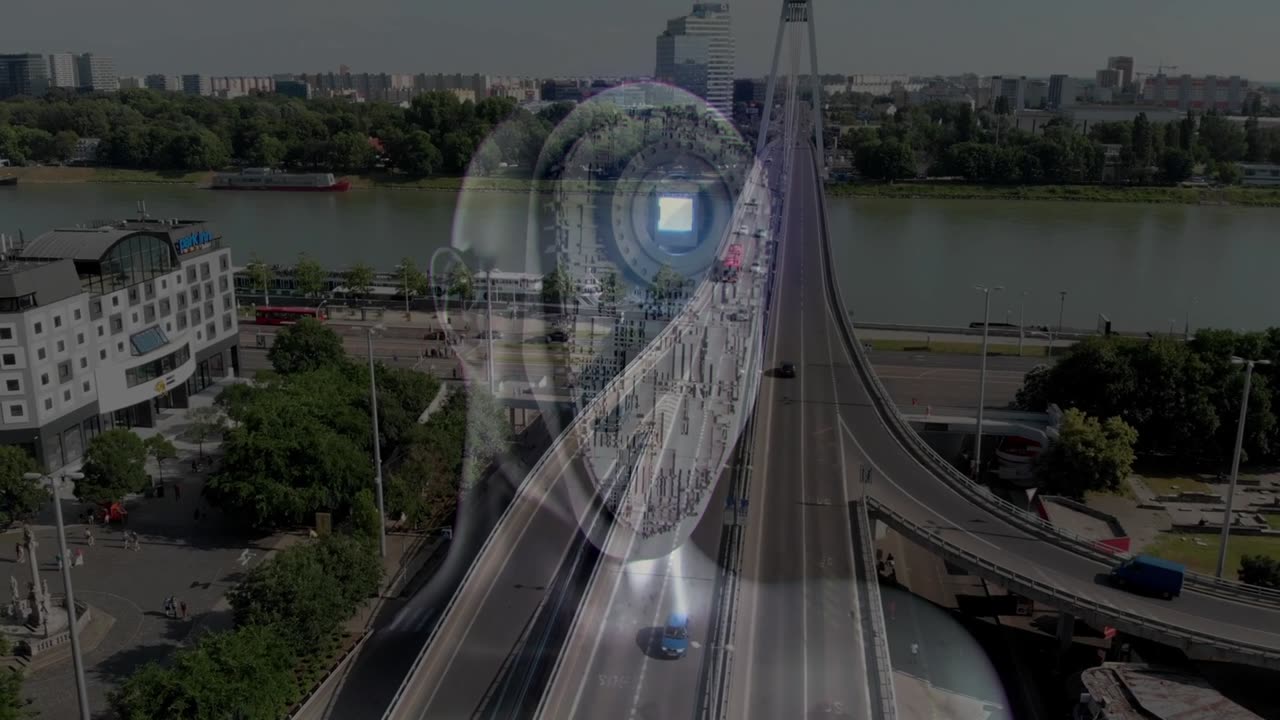
The #authors #establish the #motionmodel of a 3-body chain-type TSS in a #loweccentric elliptical #orbit, assuming that the tethers are massless and only planar motion is considered. The proposed model consists of 3 point masses (m1, m2, and m3) and 2 massless tethers (L1 and L2). The orbit of m1 is defined by its orbital geocentric distance r and true anomaly α; the position of m2 relative to m1 is determined by tether L1 and in-plane libration angle θ1; the position of m3 relative to m2 is determined by L2 and θ2.
A #combination of #exponential and uniform deployment law yields a simple and efficient #deployment scheme, providing the requisite reference trajectory for satellite deployment. To address this limitation, a hierarchical sliding mode controller (HSMC) has been designed for accurate trajectory tracking. In the controller, an auxiliary system is introduced to mitigate the input saturation caused by tether tension constraint. A 3-layer sliding surface for the whole TSS is constructed, and a disturbance observer (DO) is introduced to estimate second derivative signal q̈.
The #authors present a numerical #simulation and draw their conclusion. Two alternative #deploymentschemes are used for comparison: Scheme 1, where the system is regarded as two independent 2-body, with the tether length L2 remaining constant, and only tension T1 being adjustable. In Scheme 2, the system is regarded as two 2-body, but the coupling between adjacent tethers is neglected. The results show that the tether deployment error and libration angle converge to zero asymptotically in 3 hours under Scheme 3, and the deployment error under Schemes 1 and 2 is significantly larger than that under the proposed Scheme 3.
A comparison is made between Schemes 2 and 3, based on the integration of tracking error and #tethertension. The proposed #HSMC explicitly takes the 3-body TSS couple into account, resulting in faster and more accurate tether deployment with a smaller in-plane angle, further showing that a considerably improved deployment process is achieved under the proposed scheme and confirms its effectiveness.
-
 LIVE
LIVE
TheAlecLaceShow
2 hours agoGuests: Alex Marlow & Terry Schilling | Justice For Laken Riley | Russian ICBM | The Alec Lace Show
131 watching -
 LIVE
LIVE
Danny Haiphong
1 hour agoMARK SLEBODA & SCOTT RITTER: NATO ATTACKS RUSSIA, PUTIN FIRES ICBM WARNING SHOT AT UKRAINE—WW3 NEXT?
1,052 watching -
 40:47
40:47
Dave Portnoy
5 hours agoThe Unnamed Show With Dave Portnoy, Kirk Minihane, Ryan Whitney - Episode 37
20.5K1 -
 51:53
51:53
The Rubin Report
2 hours agoCrowd Shocked by Ben Affleck’s Unexpected Take on This Massive Change
53K35 -
 2:07:25
2:07:25
Steven Crowder
4 hours agoBREAKING: Russia Launches ICBM for First Time in History - What Happens Next?
378K185 -
 LIVE
LIVE
The Shannon Joy Show
5 hours ago🔥🔥While Americans Are Watching WWE Politics: Australia Is Ramping Up MANDATORY Digital ID🔥🔥
553 watching -
 2:03:36
2:03:36
LFA TV
15 hours agoTHE FIGHT IN ONLY BEGINNING! | LIVE FROM AMERICA 11.21.24 11am EST
46.7K20 -
 1:18:10
1:18:10
Graham Allen
6 hours agoPutin Vows Peace With Trump But WAR Under Biden!! + 400,000 Kids Are MISSING?!
116K208 -
 2:11:07
2:11:07
Matt Kohrs
13 hours agoMSTR Squeezes Higher, Bitcoin To $100k & Nvidia Post Earnings || The MK Show
56.9K1 -
 42:07
42:07
BonginoReport
7 hours agoNikki Haley's Hatred of Tulsi Gabbard Just Made Me a Bigger Fan (Ep.90) - 11/21/24
114K225