Getting Started with ROS2 Navigation - Episode 4 - Wiring for ROS2
3 years ago
22
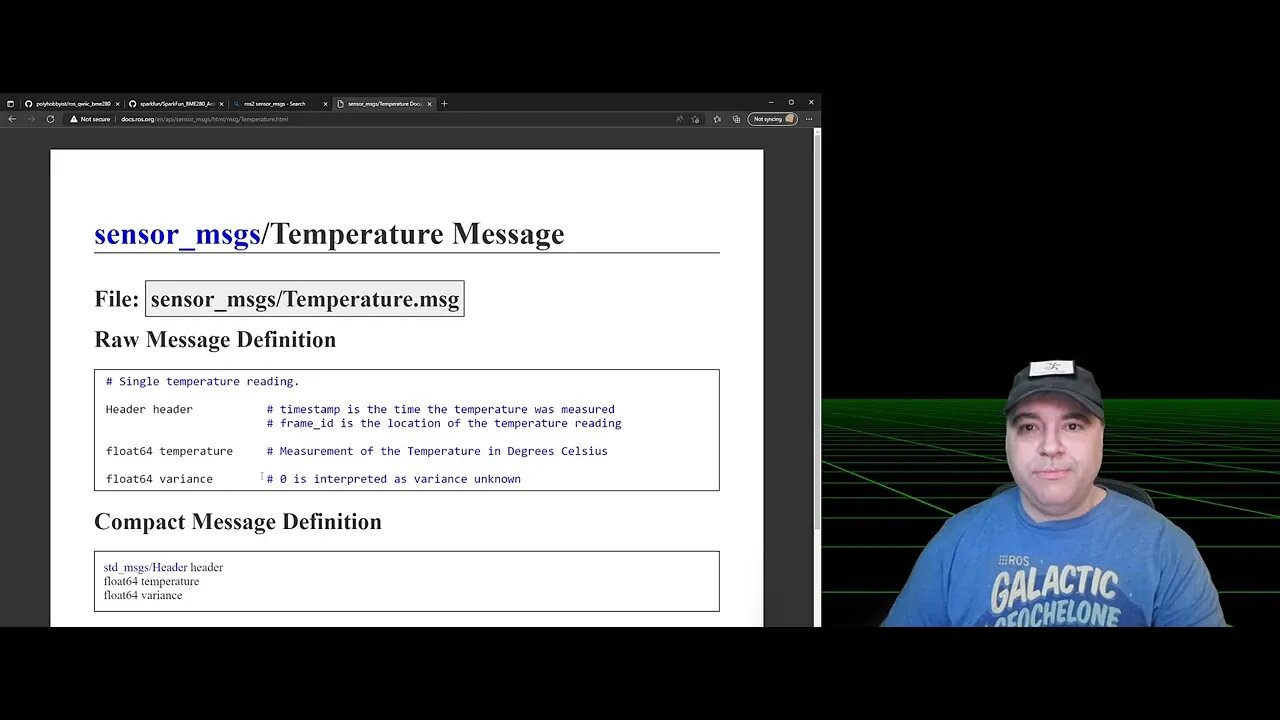
In this video I introduce "Wiring for ROS2" a side project to implement Arduino Style APIs, allowing you to use Arduino libraries produced for sensors, actuators or algorithms on computers with exposed headers like the Nvidia Jetson Nano or Raspberry Pi.
To demonstrate using the library, I bring up a ROS node which implements the Sparkfun BME280 Qwiic sensor.
The ROS2 Wiring template is available at https://github.com/polyhobbyist/ros_wiring_template.
If you are interested in using ROS2 on a Microcontroller, which offers "real-time" support - definitely check out https://micro.ros.org/.
Loading comments...
-
 59:03
59:03
NAG Podcast
8 hours agoSarah Fields: BOLDTALK W/Angela Belcamino
32.7K8 -
 1:21:41
1:21:41
Glenn Greenwald
11 hours agoGlenn Takes Your Questions: On the Argentina Bailout, Money in Politics, and More; Plus: Journalist Jasper Nathaniel on Brutality and Settler Attacks in the West Bank | SYSTEM UPDATE #541
87.6K46 -
 3:10:08
3:10:08
Barry Cunningham
8 hours agoPRESIDENT TRUMP TO USE NUCLEAR OPTION? FOOD STAMPS END! | SHUTDOWN DAY 31
52.7K41 -
 1:06:56
1:06:56
BonginoReport
16 hours agoThe Battle Between Good & Evil w/ Demonologist Rick Hansen - Hayley Caronia (Ep.168)
103K39 -
 1:12:57
1:12:57
Kim Iversen
10 hours agoBill Gates Suddenly Says “Don’t Worry About Climate Change”?
92.4K67 -
 1:05:12
1:05:12
Michael Franzese
10 hours agoI Waited 50 Years to Tell You What Happened on Halloween 1975
46.6K19 -
 1:07:15
1:07:15
Candace Show Podcast
11 hours agoINFILTRATION: Charlie Kirk Was Being Tracked For Years. | Candace Ep 256
95.8K399 -
 9:17:19
9:17:19
Rallied
10 hours ago $3.65 earnedWarzone Solo Challenges then RedSec Domination
43.4K8 -
 2:34:30
2:34:30
Red Pill News
12 hours agoBoomerang Time - DOJ Investigating BLM Fraud on Red Pill News Live
74.8K17 -
 1:46:14
1:46:14
Roseanne Barr
12 hours ago“The Over Emotional Are Always Under Informed” | The Roseanne Barr Podcast #121
98.4K67